
The Japanese moon lander successfully makes contact with the lunar surface, but its mission is jeopardized by a malfunction that cuts off its power and brings it to an early end.
A Japanese moon lander operated by a robot successfully landed on the surface of the moon on Friday. However, it experienced a technical issue that caused its solar cells to fail, leaving it unable to function in the challenging conditions of the lunar landscape.
According to mission managers, the Smart Lander for Investigating the Moon (SLIM), which appeared to be in good condition, would run out of battery shortly after landing. This would render it unable to receive instructions or send data back to Earth.
JAXA
It is possible that the probe may become operational again, if it is determined that it landed in an incorrect orientation and the angle between the sun and the solar cells improves over time. However, officials cannot guarantee this outcome.
The Peregrine lander, constructed by Astrobotic in Pittsburgh, became stuck in a highly elongated orbit around Earth due to a valve malfunction that resulted in the rupture of a propellant tank.shortly after launch
On January 8th, the company’s flight controllers instructed the spacecraft to re-enter Earth’s atmosphere, causing it to burn up in the afternoon on Thursday.
At a distinct press conference on Friday, John Thornton, the CEO of Astrobotic, commended the company’s flight controllers for successfully maintaining the spacecraft’s functionality for as long as possible. This involved activating its scientific instruments, adjusting its positioning with thrusters, and gathering valuable data that will inform the development and use of a larger moon lander, named Griffin, set to launch later this year.
“We will be forming a review committee consisting of numerous industry experts to thoroughly investigate the situation and determine the cause,” stated Thornton. “We are currently evaluating the potential consequences for the Griffin program in order to prevent any similar incidents from occurring in the future.”
He also mentioned, “We are also ensuring that the accomplishments of the Peregrine mission are integrated into the Griffin program to guarantee its success. … I am extremely confident that our upcoming mission will be a success and will successfully land on the moon’s surface.”
have been postponed due to technical difficulties.
The scheduled moon landing by Japan has been delayed because of technical issues.
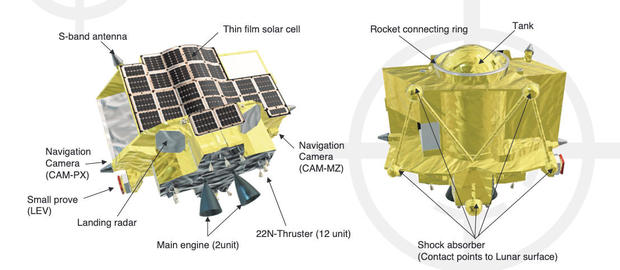
The goal of JAXA’s moon lander was twofold: first, to showcase a precise landing system that could accurately guide the probe to touchdown within a 100-meter radius, roughly equivalent to the length of a U.S. football field; and second, to trial a new lightweight design that would enable smaller spacecraft to accommodate a greater number of sensors and instruments.
JAXA
Launched
On September 7th, the 1,600-pound spacecraft was launched from the Tanegashima Space Center in southern Japan. It entered an elliptical orbit around the moon’s poles on Christmas Day and then moved into a circular orbit 373 miles above the surface earlier this month.
On Friday morning in the United States, the SLIM spacecraft initiated its last descent towards the moon’s surface from a height of approximately nine miles. Live data indicated that the spacecraft was closely adhering to its projected path, stopping multiple times to take pictures of the ground and compare them to onboard maps in order to ensure a precise landing.
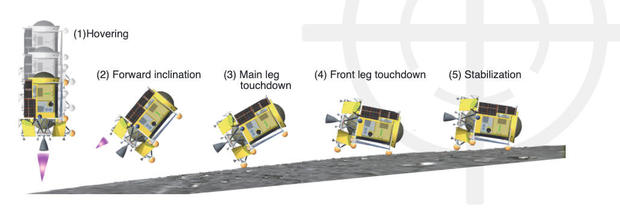
The last part of the descent seemed to proceed without any issues. SLIM successfully rotated from a horizontal to a vertical position as scheduled and gradually descended towards the ground. It was designed to deploy two small rovers, named LEV-1 and LEV-2, a short distance before landing.
The probe was designed to touch down on a slope using its two rear legs first. Afterwards, the spacecraft would tilt forward slightly and lower its front legs, aiming to position itself in a way that would optimize the generation of solar power on sloping terrain.
JAXA
The telemetry data showed that the spacecraft landed at 10:20 a.m. EST, approximately 20 minutes after beginning its descent. JAXA officials did not immediately confirm that they received the telemetry, causing concern that the spacecraft may not have successfully landed.
However, the Deep Space Network of NASA, responsible for communicating with spacecraft throughout the solar system, successfully received telemetry from either SLIM or one of the small rovers (or both) within an hour of their landing.
During the news conference after the landing, representatives from JAXA verified that the flight controllers were successfully receiving telemetry from SLIM and LEV-1. LEV-2 is responsible for transmitting data through SLIM to Earth.
Kuninaka stated that LEV-1 and LEV-2 have effectively been distinguished and efforts are being made to gather data at this moment.
Regarding SLIM, he stated that engineers are uncertain about the condition of the solar cells located on the top of the spacecraft following the landing. However, other systems were functioning properly, leading to what he described as a gentle landing.
After successfully landing, the spacecraft was able to transmit telemetry to us, indicating that the majority of its equipment is functioning properly. The descent was made from an altitude of ten kilometers, and had it not been successful, there would have been a high-speed crash resulting in the complete loss of the spacecraft’s function.
“Currently, the data is being successfully transmitted to us, indicating that our initial goal of a smooth landing was achieved.”
However, he stated that thorough data analysis will be necessary to determine the spacecraft’s position and orientation on the surface, in order to understand the events and accurately assess the landing’s precision.
More
More
Source: cbsnews.com